あそびっと
2015年12月30日
[DCC]
模型祭で自動運転
「池袋鉄道模型芸術祭」で、DCC車輌の自動運転を披露した.
「JAMコンベンション 2015」で紹介したHOとHOn3のモジュールレイアウトに、車輌の位置検知センサーを組み込んでいる.
方法は2種類あり、HOn3ナロー側は、ArduinoとDCC/MM2 シールド及び光センサーを使った自動運転装置なので
「Arduino で自動往復運転」記事を参照.
ここではHO本線側の、S88インターフェースとDSmainR5を使った、駅で停止/しばらくして発進という自動運転を紹介する.

利用したのは
Desktop Station社の「DSmainR5」(左)と、
LDT社のS88インターフェース「RM-GB-8-N」(右)
「DSmainR5」は発売前の試作機を同社から借用した.
「RM-GB-8-N」は、線路のギャップを通してDCC車両の在線チェックをする機器で、欧州では標準的に普及している規格らしい.
私は
クマタ貿易で購入した.(税別7,000円)
DSmainR5とRM-GB-8-NはLANケーブルでつなぎ、DSmainR5に入れたプログラムで自動運転する.

右のRM-GB-8-Nは、真鍮線をジャンパーにしてIN1,IN2の端子をつなげている.
この製品で8ヶ所の在線チェックができる.
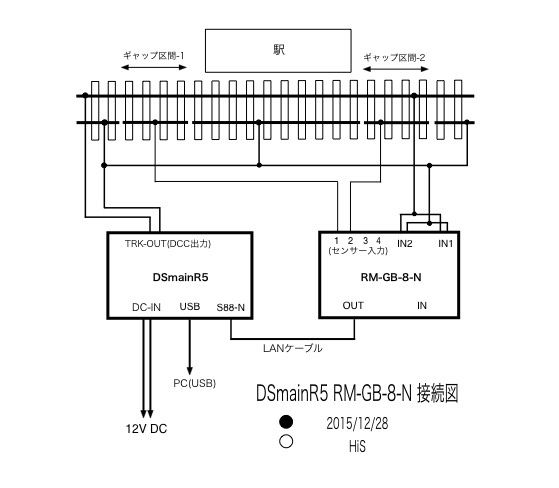
DSmainR5とRM-GB-8-Nの接続図
駅で停車するために、減速区間と進入方向を考慮して、2ヶ所のギャップを作った.
RM-GB-8-Nは、線路のDCCをIN1,IN2に入力し、ギャップ区間のレールとセンサー入力(1〜8)を結ぶ.
センサー入力端子は各番号に点線/実線マークがあるが、点線マーク側につなぐ.
DSmainR5が接続されていない場合も、RM-GB-8-Nはギャップ区間に通電するので、他のDCCコントローラーやアナログDCを使ってもそのまま走行できる.
DCCあるいはDCを通電してギャップ区間に電圧がない場合、あるいはDCC車輌がギャップ区間に入った時に線路がショート状態になる場合は、IN1,IN2への接続を逆にする.
DC通電でチェックすると、ギャップ区間は0.5Vほど電圧が下がるようだ.
センサーが8個以上必要な時は、RM-GB-8-NをIN/OUT端子を通して複数個つなげることができる.

S88方式による在線チェックは、動力車が乗った時に左右レール間の抵抗値が変化することを検知しているので、ギャップ区間が短いと検知できない.
基本的には動力車の全長以上のギャップ区間が必要で、上写真のギャップ区間-1は、試行錯誤の末、ぎりぎりまで広げた.

HO側は、4接点を台枠外に出してRM-GB-8-Nに接続している.
右の箱は、HOn3側の光センサー検知自動運転装置.
発進加速し駅手前で減速/停止をくりかえすArduino用スケッチプログラム.
ランダムにサウンドを鳴らしている.
ロコのDCCアドレスやギャップ区間-1/-2のどちらを使うか等の指定は、PCでこのプログラムを書き換えて、DSmainR5に登録する必要がある.
機器/ソフトとも動作は安定しており、旧DSmainR4にあった出力電流不足の問題は解消したようで、2日間運用して大きな問題はなかった.
このようなプログラムを書くのでなく、DesktopStationというWindowsのアプリケーションで自動運転する方法は、次回に紹介する.
YouTube動画

(HOn3/HO 自動停止/発進)